В момент пуска якорь двигателя неподвижен (n = 0), поэтому отсутствует противоЭДС (E = CeФn = 0). Из уравнения якорной цепи видно, что пусковой ток якоря Iя.п = Uном/Rя ограничен только сопротивлением обмотки якоря Rя. Поскольку Rя мало (особенно у ДПТ средней и большой мощности), то пусковой ток велик и превышает номинальное значение в десятки раз (рис. 3.77). Время пуска tп длится десятые доли секунды у маломощных двигателей (менее 1 кВт) и достигает нескольких десятков секунд у мощных.
Существуют три способа пуска: 1) прямой пуск;
2) применение пускового реостата; 3) снижение напряжения якоря.
 |
Рис.26.8. Пусковые характеристики ДПТ
Прямой пуск применяют только для маломощных двигателей, у которых Iя.п не превышает( 4¸6)Iном.
 Рис. 26.9. Пуск ДПТ с реостатом Рис. 26.9. Пуск ДПТ с реостатом |
Реостатный пуск. Пусковой реостат Rп включают последовательно с обмоткой якоря (рис. 26.6,в). В момент пуска Rп вводится полностью.
 .
.
Сопротивление реостата Rп рассчитывают так, чтобы для машин средней и большой мощности обеспечить Iп = (1,4¸1,8)Iном, а для машин малой Iп = (2¸2,5)Iном. Обычно по мере разгона двигателя сопротивление Rп ступенчато выводят до нуля. Иллюстрация пуска для ДПТ параллельного возбуждения приведена на рис.26.9. Введение в цепь якоря сопротивления Rп приводит к уменьшению «жесткости» механической характеристики тем сильнее, чем больше Rп. Получаемые при этом характеристики называют искусственными. На рис. 26.9 искусственной характеристике И3 соответствует Rп с введенными тремя ступенями. Поочередный вывод ступеней Rп дает «веер» характеристик И3, И2, И1, Е, где Е – естественная характеристика. Частота холостого хода п при этом сохраняется. Процесс пуска характеризуется зигзагообразным движением точки вдоль стрелок из точки 1 к точке 8.
Снижение пускового тока снижает и пусковой момент Мп, что ведет к затяжке пуска или даже его срыву. Поэтому в начале пуска увеличивают магнитный поток за счет вывода реостата Rр в цепи возбуждения (рис. 26.6, в). По мере разгона ДПТ Rр вводят с целью достижения требуемой частоты вращения. Эта мера позволяет двигателю при небольшом пусковом токе развить большой пусковой момент.
Пуск при пониженном напряжении U позволяет исключить применение пусковых реостатов. Недостатком этого способа является необходимость в источнике регулируемого напряжения, но этот источник можно также использовать для регулирования частоты вращения.
26.5. Регулирование частоты вращения ДПТ
Задача управления двигателем в основном сводится к регулированию частоты вращения. Реже встречается задача управления моментом двигателя. Из формулы n следует, что изменение частоты вращения может достигаться тремя способами:
– включением реостата Rр в цепь якоря (реостатное регулирование);
– изменением магнитного потока Φ (полюсное регулирование);
–изменением подводимого к якорю напряжения (якорное регулирование).
При реостатном регулировании вместо пускового реостата Rп в цепь якоря вводится регулировочный реостат Rр, рассчитанный на длительные тепловые перегрузки. Ступенчатое увеличение Rр при Mc = = const снижает частоту вращения (характеристики И3, И2, И1, Е – рис. 26.9). Из-за больших потерь в Rр этот способ регулирования применяют только для двигателей небольшой мощности.
Полюсное регулирование. Для ДПТ параллельного возбуждения изменение магнитного потока Φ достигается введением регулировочного реостата Rр в цепь ОВ (рис.26.10, а). При увеличении Rр ток Iв и магнитный поток Φ уменьшаются, что согласно формуле (3.64), дает увеличение частоты холостого хода n. Жесткость механической характеристики уменьшается незначительно (рис. 26.10, а). Таким образом, изменением (уменьшением) магнитного потока можно увеличить частоту вращения n, но не более чем до 2nном, что связано с ухудшением коммутации. Регулирование n в сторону уменьшения практически невозможно из-за насыщения магнитной системы. Сильное снижение Φ, например до величины Φост, при случайном обрыве обмотки возбуждения при незначительном моменте Mс на валу ведет к «разносу» двигателя (пунктирная характеристика на рис. 26.10, а).
 Рис. 26.10. Изменение характеристик при регулировке частоты вращения ДПТ с помощью: а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (неза- висимое возбуждение) Рис. 26.10. Изменение характеристик при регулировке частоты вращения ДПТ с помощью: а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (неза- висимое возбуждение) |
Для ДПТ последовательного возбуждения изменение Φ достигается реостатом Rр1, включенным параллельно обмотке возбуждения (рис. 26.10, б). Выведение Rр1 уменьшает поток Φ (2 на рис. 26.10, б).
 Рис.26.11. Полупроводниковые регуляторы частоты вращения ДПТ: а – тиристорный; б – транзисторный Рис.26.11. Полупроводниковые регуляторы частоты вращения ДПТ: а – тиристорный; б – транзисторный |
Изменение питающего напряжения якоря для ДПТ независимого возбуждения обеспечивает регулировку частоты вниз от номинального значения (рис. 26.10, в). Обычно этот способ осуществляют с помощью управляемого тиристорного выпрямителя (рис. 26.11, а) или с помощью транзисторного преобразователя (рис. 26.11, б).
Для сглаживания пульсаций выпрямленного тока в тиристорном выпрямителе последовательно с якорем включен дроссель L1 с большой индуктивностью. Импульсный преобразователь (рис. 26.11, б) содержит неуправляемый выпрямитель с напряжением U, транзистор VT1, работающий в ключевом режиме, широтно-импульсный модулятор (ШИМ), управляющий работой ключа, и диод VD1. VT1 периодически с периодом T подключает якорь двигателя к напряжению U. В момент времени t1 ключ размыкается, но ток якоря замыкается через VD1, и ДПТ продолжает работать за счет запасенной электромагнитной энергии. Изменением момента t1 (рис. 3.81) регулируются средние значения напряжения Uср и тока Iср.
 Рис.26.12.Временные диаграммы преобра- зователя с ШИМ Рис.26.12.Временные диаграммы преобра- зователя с ШИМ |
Изменением напряжения частоту n регулируют только «вниз». Частота холостого хода n при этом также уменьшается, а жесткость характеристик сохраняется (рис. 26.10, б, в – ДПТ последовательного и независимого возбуждения).
Торможение ДПТ
Для быстрого торможения двигателя его переводят в режим, при котором электромагнитный момент изменяет направление.
Различают три способа торможения:
При динамическом торможении якорь отключают от питающего напряжения и замыкают на реостат Rт (рис.26.13, а). Из уравнения для якорной цепи 0 = Е + (Rя + Rт)Iя следует, что ток Iя, а значит и момент М, изменяют направление (рис.26.13, б). Поскольку частота n не может изменяться скачком, то в момент переключения рабочая точка из а1 по горизонтали переходит в а2 и затем, замедляясь по наклонной прямой, в точку останова 0.
 Рис.26.13. Схема (а) и диаграмма (б) динамического торможения, диаграмма рекуперативного торможения (в) Рис.26.13. Схема (а) и диаграмма (б) динамического торможения, диаграмма рекуперативного торможения (в) |
Рекуперативное торможение происходит при наличии условия E > U. Из уравнения U = E + IяRя следует, что при этом Iя, а значит и M, становятся отрицательными, что может наблюдаться при спуске двигателем груза или ходе под уклон трамвая. Якорь может набрать частоту n > n. На рис. 26.13, в это соответствует движению рабочей точки из позиции а1, через точку n в а2, т. е. переходу машины из двигательного режима (M > 0) в генераторный (M
20.Способы пуска двигателя постоянного тока.
Возможны три способа пуска двигателя в ход:
1) прямой пуск, когда цепь якоря приключается непосредственно к сети на ее полное напряжение;
2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря;
3) пуск при пониженном напряжении цепи якоря.
прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Ra относительно велико и поэтому при пуске процесс пуска длится не более 1—2 сек.
Самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений
Способы пуска двигателя постоянного тока
1. Прямой пуск — обмотка якоря подключается непосредственно к сети.
Ток якоря двигателя определяется формулой  . (4.1) Если считать, что при прямом пуске значения напряжения питания U и сопротивления якорной обмотки Rя остаются неизменными, то ток якоря зависит от противо — ЭДС Е. В начальный момент пуска якоря двигатель неподвижен (=0) и в его обмотке Е=0.Поэтому при подключении к сети в обмотке возникает пусковой ток
. (4.1) Если считать, что при прямом пуске значения напряжения питания U и сопротивления якорной обмотки Rя остаются неизменными, то ток якоря зависит от противо — ЭДС Е. В начальный момент пуска якоря двигатель неподвижен (=0) и в его обмотке Е=0.Поэтому при подключении к сети в обмотке возникает пусковой ток  . (4.2) Обычно сопротивление Rя невелико, особенно у двигателей большой мощности, поэтому значение пускового тока достигает 20 раз превышающих номинальный ток двигателя.недопустимо больших значений, в 10 При этом создается опасность поломки вала машины и появляется сильное искрение под щетками коллектора. По этой причине такой пуск применяется только для двигателей малой мощности, у которых Rя относительно велико.
. (4.2) Обычно сопротивление Rя невелико, особенно у двигателей большой мощности, поэтому значение пускового тока достигает 20 раз превышающих номинальный ток двигателя.недопустимо больших значений, в 10 При этом создается опасность поломки вала машины и появляется сильное искрение под щетками коллектора. По этой причине такой пуск применяется только для двигателей малой мощности, у которых Rя относительно велико.
2)Реостатный пуск — в цепь якоря включается пусковой реостат для ограничения тока. В начальный момент пуска при =0 и Rп=мах ток якоря будет равен
 . (4.3) Максимальное значение Rп подбирают так, чтобы для машин большой и средней мощности ток якоря при пуске
. (4.3) Максимальное значение Rп подбирают так, чтобы для машин большой и средней мощности ток якоря при пуске  , а для машин малой мощности
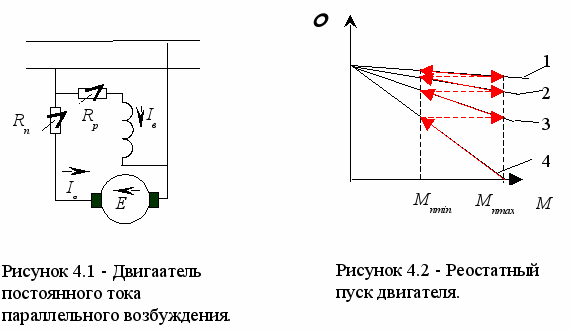
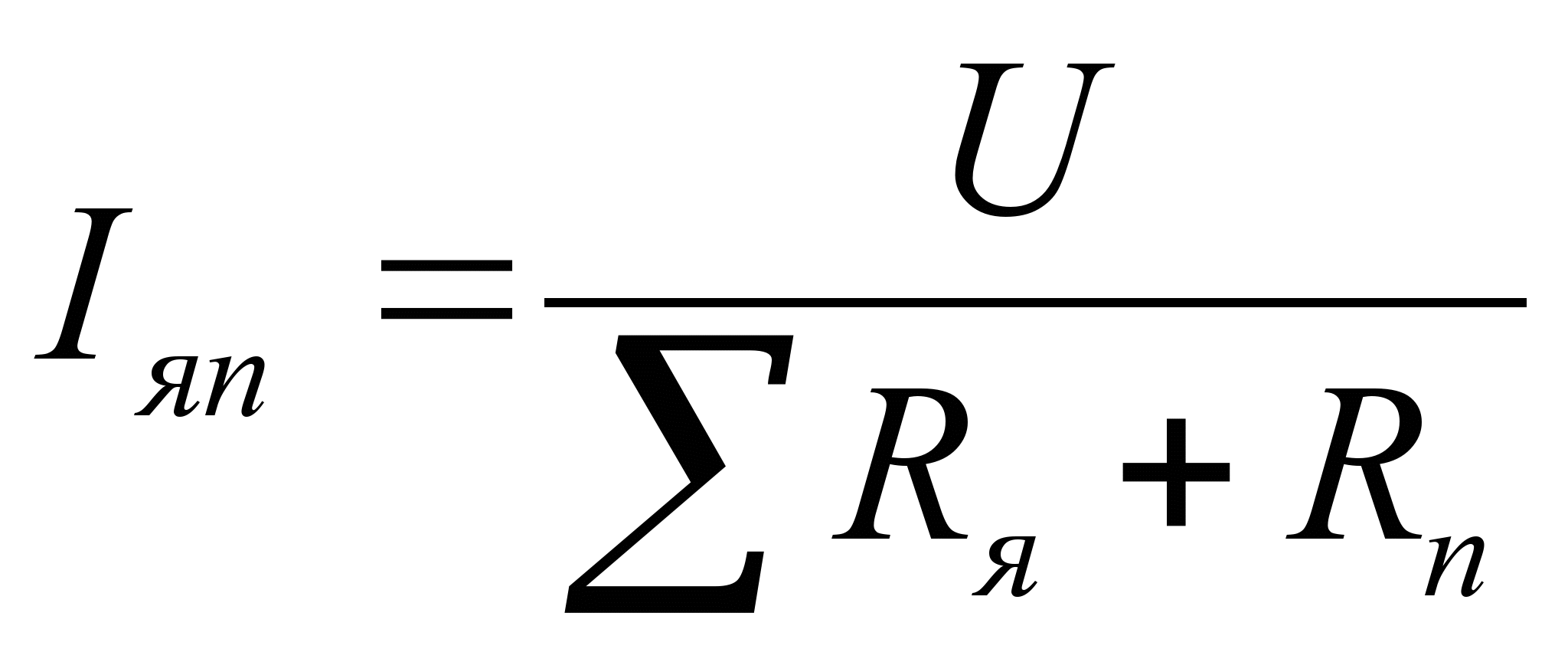
, а для машин малой мощности  . Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением рис 4.1. В начальный момент пуск осуществляется по реостатной характеристике 4, соответствующей максимальному значению сопротивления Rп, при этом двигатель развивает максимальный пусковой момент Мпmax .Регулировочный реостат Rр выводится так, чтобы Iв и Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением скорости вращения ротора растет и ЭДС Е, а как следствие, уменьшается ток якоря, определяющий его величину. При достижении некоторого значения Мпmin часть сопротивления Rп выводится, вследствие чего момент снова возрастает до Мпmax , двигатель переходит на работу по реостатной характеристике 3 и разгоняется до значения Мпmin . Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатной характеристики до выхода на естественную характеристику 1.Средний вращающий момент при пуске определяется из выражения
. Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением рис 4.1. В начальный момент пуск осуществляется по реостатной характеристике 4, соответствующей максимальному значению сопротивления Rп, при этом двигатель развивает максимальный пусковой момент Мпmax .Регулировочный реостат Rр выводится так, чтобы Iв и Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением скорости вращения ротора растет и ЭДС Е, а как следствие, уменьшается ток якоря, определяющий его величину. При достижении некоторого значения Мпmin часть сопротивления Rп выводится, вследствие чего момент снова возрастает до Мпmax , двигатель переходит на работу по реостатной характеристике 3 и разгоняется до значения Мпmin . Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатной характеристики до выхода на естественную характеристику 1.Средний вращающий момент при пуске определяется из выражения  . (4.4) двигатель при этом разгоняется с некоторым постоянным ускорением.
. (4.4) двигатель при этом разгоняется с некоторым постоянным ускорением.
Аналогичный пуск возможен и для двигателей последовательного возбуждения. Количество ступеней пуска зависит от жесткости естественной характеристики и требований предъявляемых к плавности пуска. Пусковые реостаты рассчитываются на кратковременную работу под током.
В реальных устройствах пуск осуществляется автоматически. Микроконтроллер, по з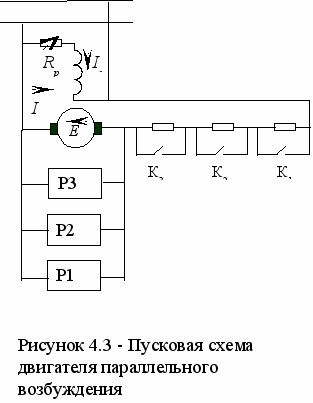 аданному алгоритму, управляет коммутирующими элементами (релейное управление), отключая секции пускового реостата и практически реализуя описанный выше процесс.
аданному алгоритму, управляет коммутирующими элементами (релейное управление), отключая секции пускового реостата и практически реализуя описанный выше процесс.
Алгоритм управления может быть построен с использованием трех основных принципов:
3) Принцип времени.
Идею реализации данных принципов можно пояснить с помощью пусковой схемы на электромагнитных реле (что практически применялось до широкого внедрения микропроцессорных систем управления) рисунок 4.3. К якорю машины подключается параллельно ряд реле, которые с ростом скорости вращения, а значит, ЭДС, последовательно срабатывают и своими контактами выводят из работы секции пускового реостата, постепенно уменьшая сопротивление якорной цепи.
При использования принципа тока применяются последовательно включенные реле тока, которые дают команду через свои нормально замкнутые контакты на последовательное включение соответствующих контакторов Кi при снижении тока до заданного уровня.
Принцип времени предполагает применение реле времени, которые через расчетные уставки времени дают команду на шунтирование секций реостата.
4)Пуск путем плавного повышения питающего напряжения — пуск осуществляется от отдельного регулируемого источника питания. Применяется для двигателей большой мощности, где нецелесообразно применять громоздкие реостаты из-за значительных потерь электроэнергии.
Если двигатель включить в сеть напряжением U, то в начальный момент пуска якорь двигателя в силу инерции остается неподвижным (n==0) и противо-э.д.с. E отсутствует. Поэтому ток Iя в начальный момент пуска, определяемый формулой:
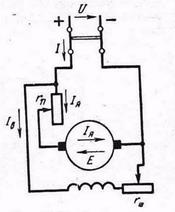 |
 Схема включения двигателя параллельного возбуждения.
Схема включения двигателя параллельного возбуждения.
во много раз превышает ток Iя.н двигателя. Чтобы предохранить двигатель от чрезмерно большого пускового тока Iк, опасного для целости обмотки якоря и коллектора, последовательно с якорем включают пусковой реостат rп (рисунок по теме ). Благодаря этому ток якоря в начальный момент пуска
Так как продолжительность пуска невелика, то величину пускового тока можно допустить равной 1,2—2 Iя.н. Начальный пусковой момент двигателя, пропорциональный току якоря Iя.пуск,
при этом будет также превышать номинальный момент двигателя в 1,2—2 раза, т. е. Мпуск. нач.= (1,2—2) Мн (чем больше пусковой момент электродвигателя, тем при прочих равных условиях меньше продолжительность пуска).
По мере разгона двигателя индуктируемая в обмотке якоря противо-э.д.с. возрастает, что влечет за собой уменьшение тока якоря и снижение развиваемого двигателем вращающего момента. Для поддержания вращающего момента на определенном уровне многоступенчатый пусковой реостат постепенно выводится из цепи якоря. При достижении двигателем полной скорости пусковой реостат целиком выключается.
Дата добавления: 2016-06-09 ; просмотров: 3828 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ