
Гидравлический привод судовых механизмов получил большое распространение. В настоящее время на судах гидрофицированы следующие механизмы:
· Грузоподъемные краны и лебедки;
· Промысловые механизмы рыболовецких судов;
· Механизмы судов технического флота.
Большинство этих механизмов в качестве двигателя приводящего во вращение насос (т.е. являющегося источником механической энергии) используют электродвигатель. Включение, выключение, регулирование скорости и изменение направления вращения большинства перечисленных механизмов производится также при помощи электрических аппаратов.
Таким образом, эксплуатации и ремонт таких механизмов требует совместных усилий судовых механиков и электромехаников.
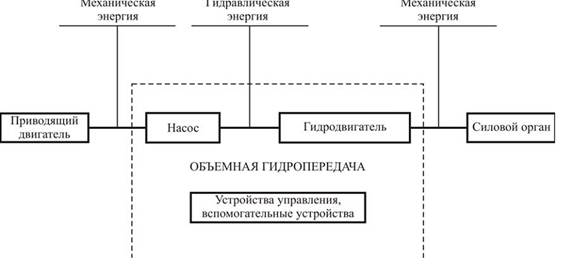
Гидравлический привод (гидропривод) — совокупность устройств, предназначенных для приведения в движение машин и механизмов посредством гидравлической энергии.
Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача (редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.).
Основная функция гидропривода, как и механической передачи, — преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.).
Гидроприводы могут быть двух типов: гидродинамические и объёмные.
В гидродинамических приводах используется в основном кинетическая энергия потока жидкости (и соответственно скорости движения жидкостей в гидродинамических приводах велики в сравнении со скоростями движения в объёмном гидроприводе).
В объёмных гидроприводах используется потенциальная энергия давления рабочей жидкости (в объёмных гидроприводах скорости движения жидкостей невелики — порядка 0,5-6 м/с).
Объёмный гидропривод — это гидропривод, в котором используются объёмные гидромашины (насосы и гидродвигатели). Объёмной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении её из рабочей камеры. К объёмным машинам относят, например, поршневые насосы, аксиально-поршневые, радиально-поршневые, шестерённые гидромашины и др.
Одна из особенностей, отличающая объёмный гидропривод от гидродинамического, — большие давления в гидросистемах. Так, номинальные давления в гидросистемах экскаваторов могут достигать 32 МПа, а в некоторых случаях рабочее давление может быть более 300 МПа, в то время как гидродинамические машины работают обычно при давлениях, не превышающих 1,5—2 МПа.
Объёмный гидропривод намного более компактен и меньше по массе, чем гидродинамический, и поэтому он получил наибольшее распространение.
Предметом дальнейшего рассмотрения будет исключительно объемный гидропривод.
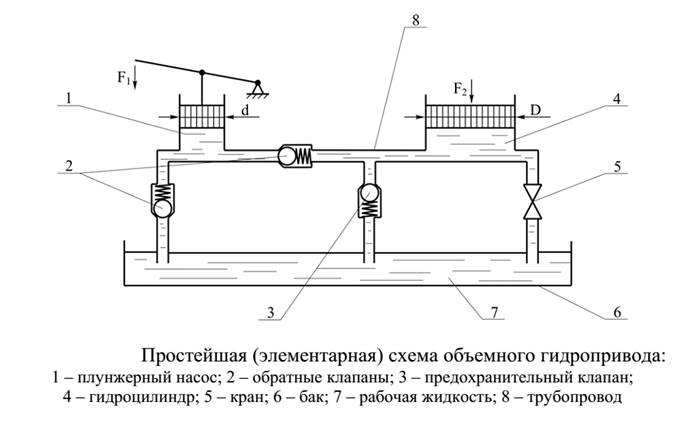
Схема, представленная на рисунке 1.8, работает следующим
образом. Источник гидравлической энергии – плунжерный насос
приводится в движение рычагом под действием мускульной энергии. При
движении плунжера вверх в цилиндре создается разрежение. Под
действием избыточного давления жидкость из бака открывает обратный
клапан и заполняет цилиндр насоса. Достигнув крайней верхней точки,
плунжер двигается вниз, и обратный клапан закрывается. Жидкость в
цилиндре оказывается в замкнутом объеме, так как выпускающий
обратный клапан закрыт под действием давления в рабочем цилиндре,
возникающем под действием внешней нагрузки F2. При дальнейшем
движении плунжера насоса вниз давление в замкнутом объеме достигает
давления в рабочем цилиндре, и выпускающий обратный клапан
открывается, пропуская жидкость в гидроцилиндр, которая увеличивает
объем жидкости в нем и поднимает поршень гидроцилиндра. Для
опускания поршня гидроцилиндра предусмотрен кран ручного управления.
Для предохранения системы от перегрузки устанавливается также
предохранительный клапан, который открывается, когда давление в
системе превышает допустимое и жидкость из замкнутого объема
сливается в бак.
Электрогидравлический привод. Привод, в котором рабочий орган приводится в действие гидродвигателем вращательного или поступательного действия. Подача рабочей жидкости производится насосом. Источником энергии для вращения насоса является электродвигатель, работающий, как правило, с неизменной частотой вращения в одном направлении. Изменение направления вращения, регулирование скорости производится гидравлической аппаратурой с электрическим управлением.
В общих чертах, передача мощности в гидроприводе происходит следующим образом:
Электродвигатель передаёт вращающий момент на вал насоса, который сообщает энергию рабочей жидкости.
Рабочая жидкость по гидролиниям через регулирующую аппаратуру поступает в гидродвигатель, где гидравлическая энергия преобразуется в механическую.
После этого рабочая жидкость по гидролиниям возвращается либо в бак, либо непосредственно к насосу.

В зависимости от конструкции и типа входящих в состав гидропередачи элементов объёмные гидроприводы можно классифицировать по нескольким признакам.
По характеру движения выходного звена гидродвигателя
· Гидропривод вращательного движения когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус) совершает неограниченное вращательное движение;

· Гидропривод поступательного движения у которого в качестве гидродвигателя применяется гидроцилиндр — двигатель с возвратно-поступательным движением ведомого звена (штока поршня, плунжера или корпуса);

· Гидропривод поворотного движения когда в качестве гидродвигателя применён поворотный гидродвигатель, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 270°

Схемы простейших электроприводов

1 – насос; 2 – гидродвигатель; 3 – распределитель; 4 – предохранительный клапан; 5 – бак; 6 – дроссель; 7 – обратный клапан

По возможности регулирования:
Если скорость выходного звена (гидроцилиндра, гидромотора) регулируется изменением частоты вращения двигателя, приводящего в работу насос, то гидропривод считается нерегулируемым.
Регулируемым называется электропривод, в котором в процессе его эксплуатации скорость выходного звена гидродвигателя можно изменять по требуемому закону. В свою очередь регулирование может быть:
Регулирование может быть: ручным или автоматическим.
По схеме циркуляции рабочей жидкости.
Гидропривод с замкнутой схемой циркуляции[править в котором рабочая жидкость от гидродвигателя возвращается во всасывающую гидролинию насоса.

Гидропривод с замкнутой циркуляцией рабочей жидкости компактен, имеет небольшую массу и допускает большую частоту вращения ротора насоса без опасности возникновения кавитации, поскольку в такой системе во всасывающей линии давление всегда превышает атмосферное. К недостаткам следует отнести плохие условия для охлаждения рабочей жидкости, а также необходимость спускать из гидросистемы рабочую жидкость при замене или ремонте гидроаппаратуры;
Гидросистемы с замкнутой схемой циркуляции рабочей жидкости (справа) и с разомкнутой схемой (слева). На схеме слева всасывающая и сливная гидролинии сообщаются с баком (разомкнутая схема); на схеме справа бак используется только для вспомогательной гидросистемы (системы подпитки). Н и Н1 — насосы; М — гидромотор; Р — гидрораспределитель; Б — гидробак; Н1 — насос системы подпитки; КП1, КП2, — Предохранительные клапана; КО1 и КО2 — обратные клапана. Предохранительные клапана КП (на схеме слева), КП1 и КП2 (на схеме справа) срабатывают в тот момент, когда нагрузка на валу гидромотора слишком велика, и давление в гидросистеме превышает допустимую величину. Обратные клапана КО1 и КО2 срабатывают тогда, когда давление слишком мало, и возникает опасность кавитации.
Гидропривод с разомкнутой системой циркуляции в котором рабочая жидкость постоянно сообщается с гидробаком или атмосферой.
Достоинства такой схемы — хорошие условия для охлаждения и очистки рабочей жидкости. Однако такие гидроприводы громоздки и имеют большую массу, а частота вращения ротора насоса ограничивается допускаемыми (из условий бескавитационной работы насоса) скоростями движения рабочей жидкости во всасывающем трубопроводе.
Аналогии гидро- и электропривода
| Характеристика | Гидропривод | Электропривод постоянного тока |
| Схема |  |
 |
| Величина изменяющаяся при изменении Мс | Давление р | Ток якоря I |
| Величина, от которой зависит скорость перемещения рабочего органа | Расход Q | Напряжение Uя |
| Потребляемая приводным двигателем из сети мощность |  |
 |

1.1. Насосы постоянной подачи

Общее обозначение нерегулируемого насоса на

Тест «Геометрия». Идеальный вариант для развития памяти, внимания изучающих технические специальности
Широкое распространение в станках и промышленных работах с ЧПУ получили электрогидравлические приводы с управлением от задающих электрических (шаговых) двигателей. Такие двигатели позволяют преобразовывать дискретные электрические сигналы управления, поступающие от электронной системы с ЧПУ, в дискретный поворот выходного вала с определенным углом поворота на каждый импульс, который называется угловым шагом.
Шаговый двигатель обладает высоким быстродействием и развивает на выходном валу крутящий момент, достаточный для перемещения золотника дросселируещего распределителя. Угловой шаг шагового двигателя (типа ШД5-Д1М) составляет 1,5 ; крутящий момент 40 Н*см; накопленная частота подачи импульсов 8000 имп/с.
; крутящий момент 40 Н*см; накопленная частота подачи импульсов 8000 имп/с.
Схема электрогидравлического шагового привода вращательного движения (типа Э32Г18-2):

Электрические управляющие импульсы поступают на шаговый двигатель.
Вращение его выходного вала передается на гайку 1, запрессованную от осевого смещения. В зависимости от направления вращения гайки винт 2, связанный с золотником дросселирующего распределителя РДР, перемещается влево или вправо и сдвигает золотник относительно среднего положения. Масло под давлением направляется в рабочие полости гидромотора (М) так, что направление вращения выходного вала гидромотора совпадает с направлением вращения вала ШД.
Винт 2 своим вторым концом связан с валом гидромотора (М) через шлицевую муфту 3. Поэтому при вращении этого вала винт вворачивается в гайку или выворачивается из нее, перемещаясь вдоль оси по направлению к нейтральному положению РДР.
Если вал ШД повернется на какой-либо угол и остановится, то вал гидромотора повернется на такой же угол. Если же вал ШД будет вращаться с постоянной угловой скоростью, то вал гидромотора будет вращаться с такой же частотой, но с некоторым отставанием по углу (рассогласование по положению). После остановки вала ШД, вал гидромотора (М) «догонит» его и остановится в том же угловом положении с точностью менее одного импульса.
Крутящий момент на выходном валу гидромотора в 100 и более раз превышает момент на валу ШД, поэтому элементы привода, представляют собой гидравлический усилитель крутящих моментов.
Гидропривод получил широкое распространение благодаря следующим преимуществам: высокая удельная мощность на единицу массы, быстродействие, малая инерционность подвижных частей, возможность реализации автоматического управления и регулирования скорости исполнительных механизмов.
В качестве двигателя применяют гидравлические цилиндры, позволяющие получать большие усилия, т.е. реализовывать большую грузоподъёмность робота, используются у ПР с Qм>15 кг. Ими оборудованы около 40 % ПР мирового парка. Чаще всего исполнительными двигателями гидроприводов являются специализированные длинноходовые цилиндры типа ЦРГ и поворотные лопастные двигатели типа ДПГ с ограниченным углом поворота выходного вала, гидромоторы.
В гидроприводах ПР используют гидростанции, контрольно-регулирующую и распределительную аппаратуру, фильтры и другие комплектующие элементы общемашиностроительного применения. В качестве рабочей жидкости применяют минеральные масла, температура которых при эксплуатации должна находиться в интервале 0-60 0 С.
Следует отметить, что гидроприводу присущи недостатки: конструктивная сложность, необходимость автономного энергетического блока, пожароопасность и загрязнение окружающий среды вследствие утечек (через уплотнения) рабочей жидкости, большой набор элементов гидроаппаратуры (фильтров, дросселей, клапанов, трубопроводов и т.д.).
2. Электрогидравлический привод.
Электрогидравлический привод — наиболее распространенный привод промышленных роботов. В качестве примера на рис.1 изображена схема электрогидропривода.
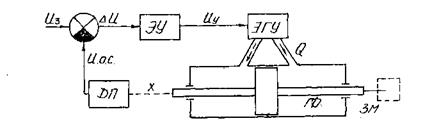
Рисунок 1 — Функциональная схема следящего электрогидравлического привода
Следящий электрогидропривод работает по замкнутой схеме. Поток жидкости Qэлектрогидравлического усилителя ЭГУ подается на гидромотор ГД, перемещающий звено манипулятора ЗМ. Положение штока гидромотора (X) регистрируется с помощью датчика положения ДП, преобразуется в электрический сигнал обратной связи Uос и сравнивается с заданным значением сигнала Uз Разность этих сигналов ∆U усиливается электронным усилителем ЭУ и подается в электрогидравлический усилитель в качестве входного сигнала Uу.
Электрогидравлический шаговый привод отличается от описанного выше тем, что в качестве управляющего звена в нем используется шаговый электродвигатель, соединенный с гидроусилителем моментов. Такая конструкция по принципу работы относится к дискретным приводам, работающим по разомкнутой схеме, что создает опасность потери информации о положении выходного звена. Поэтому при их использовании необходимо предусматривать оснащение звеньев ПР дополнительными датчиками положения.
Дата добавления: 2016-10-17 ; просмотров: 1422 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ